Experimental Validation of Decentralized Affine Transformation
Multi-Agent Drone Swarm Coordination Using Leader-Follower Framework
Experimental Demonstration
Experimental validation of decentralized affine transformation with Crazyflie 2.1 quadcopters. The video demonstrates the drone swarm executing coordinated maneuvers while maintaining formation and avoiding obstacles in a constrained environment.
Project Overview
This research presents an experimental validation of decentralized affine transformation (AT) in multi-agent systems using teams of mini-quadcopters. The AT framework enables an agent team to safely navigate constrained, obstacle-rich environments while allowing aggressive changes in inter-agent distances, which are formally characterized through the decomposition of the AT transformation matrix.
The project focuses on two-dimensional AT, formulated as a decentralized leader-follower problem. In this formulation, three leader quadcopters are positioned at the vertices of a triangle, while all follower quadcopters remain within the triangle. The leaders know the desired trajectories prescribed by the AT, whereas the followers do not. Instead, the followers infer their trajectories through local communication governed by fixed communication weights determined by the initial spatial configuration of the team.
Methodology
Decentralized Leader-Follower Framework
The decentralized affine transformation approach employs a leader-follower architecture where:
- Leader Agents: Three quadcopters positioned at triangle vertices that follow prescribed AT trajectories
- Follower Agents: Quadcopters that remain within the leader triangle and infer their trajectories through local communication
- Communication Weights: Fixed weights determined by initial spatial configuration, enabling decentralized coordination
- Asymptotic Convergence: Mathematical guarantees for trajectory convergence without centralized control
Experimental Setup
The experiments utilized the Decentralized AT framework with Crazyflie 2.1 mini-quadcopters and a motion capture system for precise position tracking. The setup enabled real-time validation of the decentralized AT algorithm in obstacle-laden environments, demonstrating the framework's capability to safely guide multi-agent teams through complex scenarios.
Experimental Results
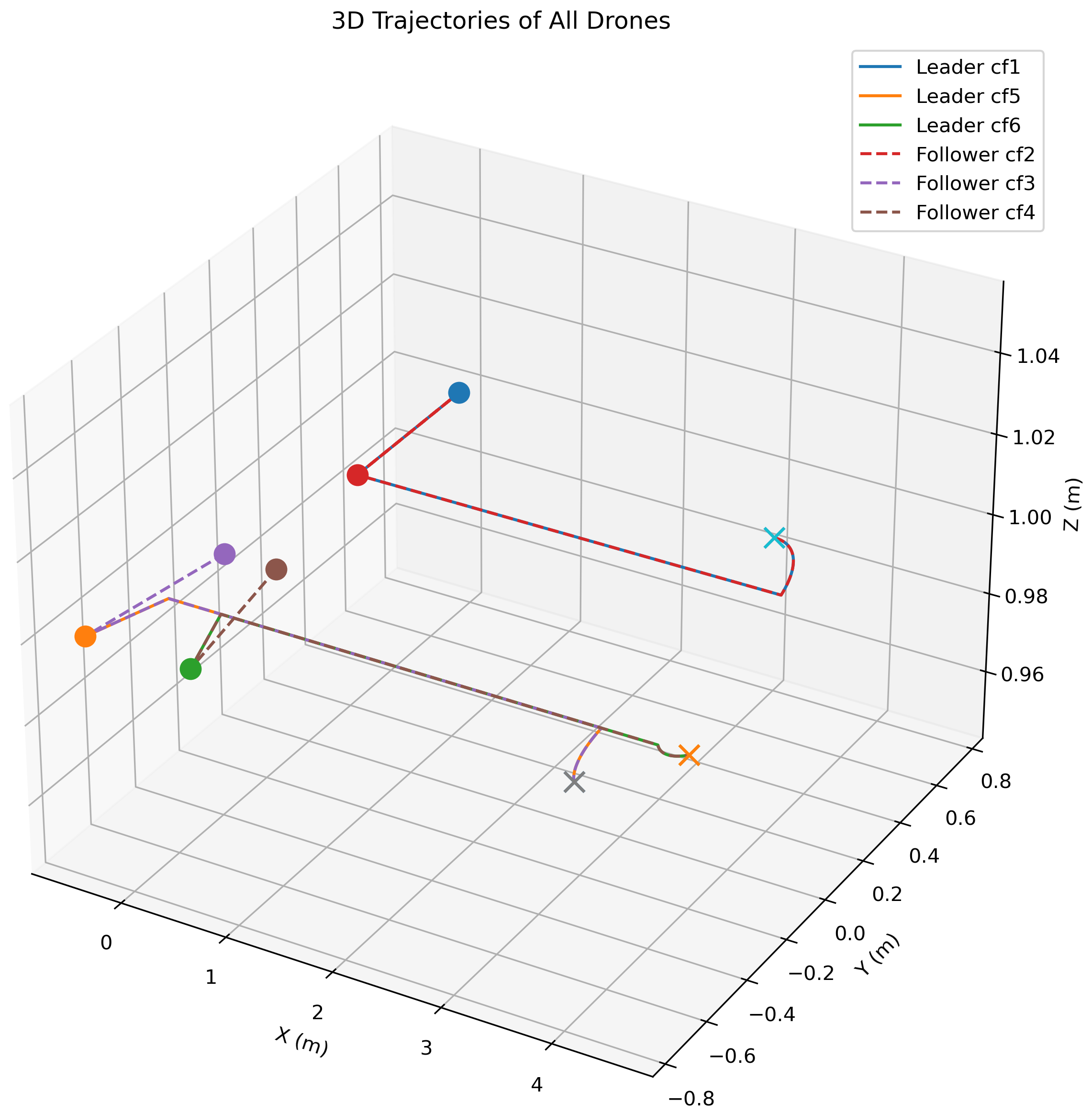
Figure 1: 3D trajectory visualization showing the drone swarm executing decentralized affine transformation. The leader quadcopters (positioned at triangle vertices) follow prescribed trajectories while follower agents maintain formation through local communication.
Figure 2: Tracking error analysis demonstrating the asymptotic convergence of the decentralized AT algorithm. The results validate the theoretical predictions and show successful trajectory following with minimal error.
Key Findings
- Asymptotic Convergence: Experimental results validate the asymptotic convergence of decentralized AT, confirming theoretical predictions
- Safe Navigation: Successfully demonstrated capability to guide multi-agent teams through obstacle-laden environments
- Aggressive Maneuvers: Enabled significant changes in inter-agent distances while maintaining formation integrity
- Decentralized Control: Achieved coordination without centralized control, relying solely on local communication
- Scalability: Framework scales effectively with team size while maintaining performance
Technical Contributions
Decentralized Architecture
Novel leader-follower framework enabling autonomous coordination without centralized control
Mathematical Validation
Rigorous experimental validation of asymptotic convergence properties
Safe Navigation
Demonstrated safe operation in constrained, obstacle-rich environments
Formation Flexibility
Support for aggressive changes in inter-agent distances during operation
Publication
Experimental Validation of Decentralized Affine Transformation
arXiv preprint arXiv:2509.10791, September 2025
Subjects: Systems and Control (eess.SY)