Decentralized Drone Swarm Coordination
Experimental validation of decentralized affine transformation for multi-agent aerial systems
Coordinating a swarm of drones through tight, obstacle-rich environments is hard. Centralized approaches require every agent to know the full plan - which doesn't scale and creates a single point of failure. If the coordinator goes down, the entire swarm goes down.
The question: can follower drones navigate safely through constrained spaces using only local communication with their neighbors - without any knowledge of the leader trajectories?
Decentralized affine transformation with leader-follower architecture
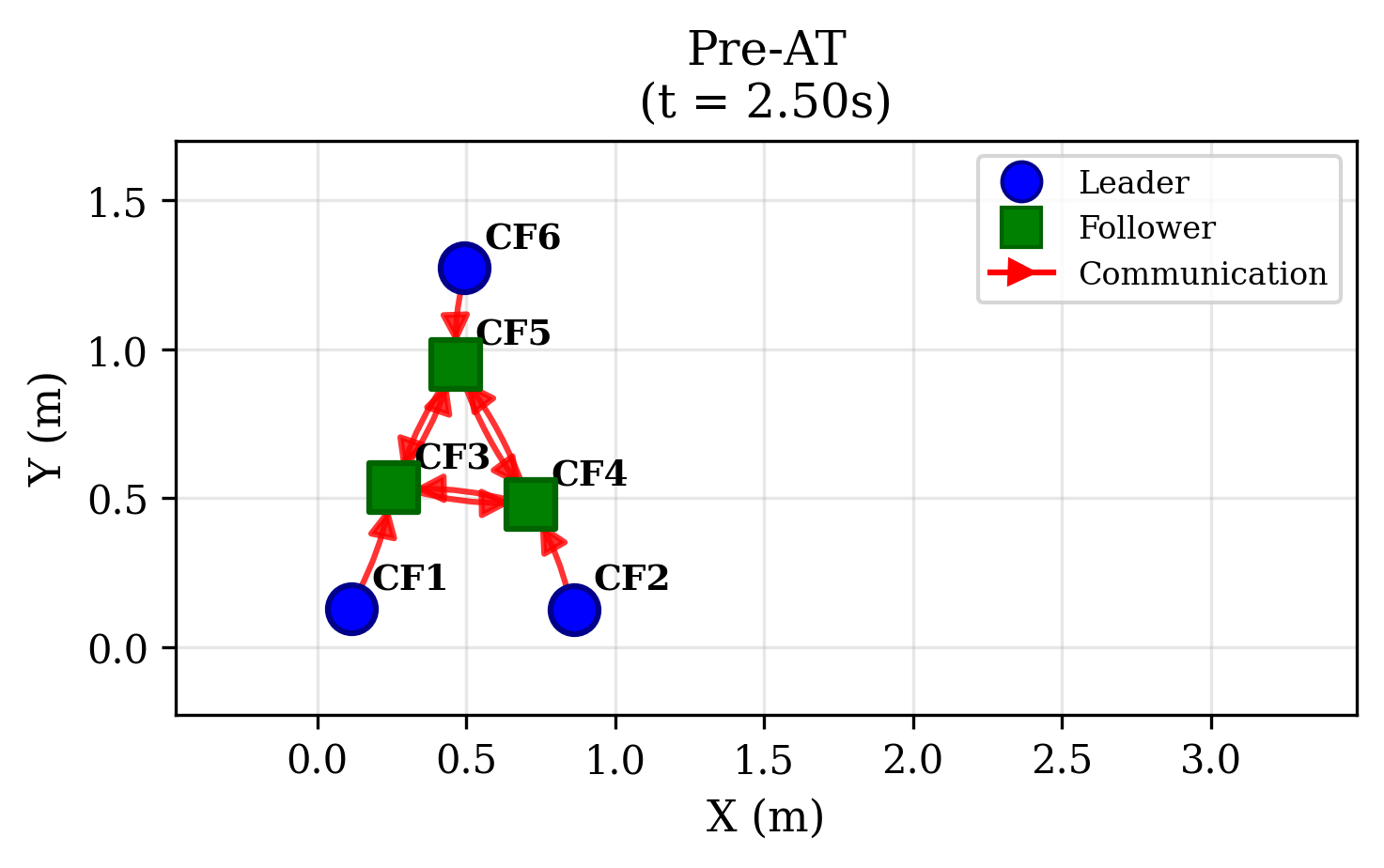
The core idea is elegant: place three leader quadcopters at the vertices of a triangle, with follower quadcopters inside. Leaders execute known trajectories. Followers compute their desired positions as weighted sums of their neighbors' actual positions, using fixed barycentric weights calculated once from the initial configuration. No global planner, no trajectory broadcasting.
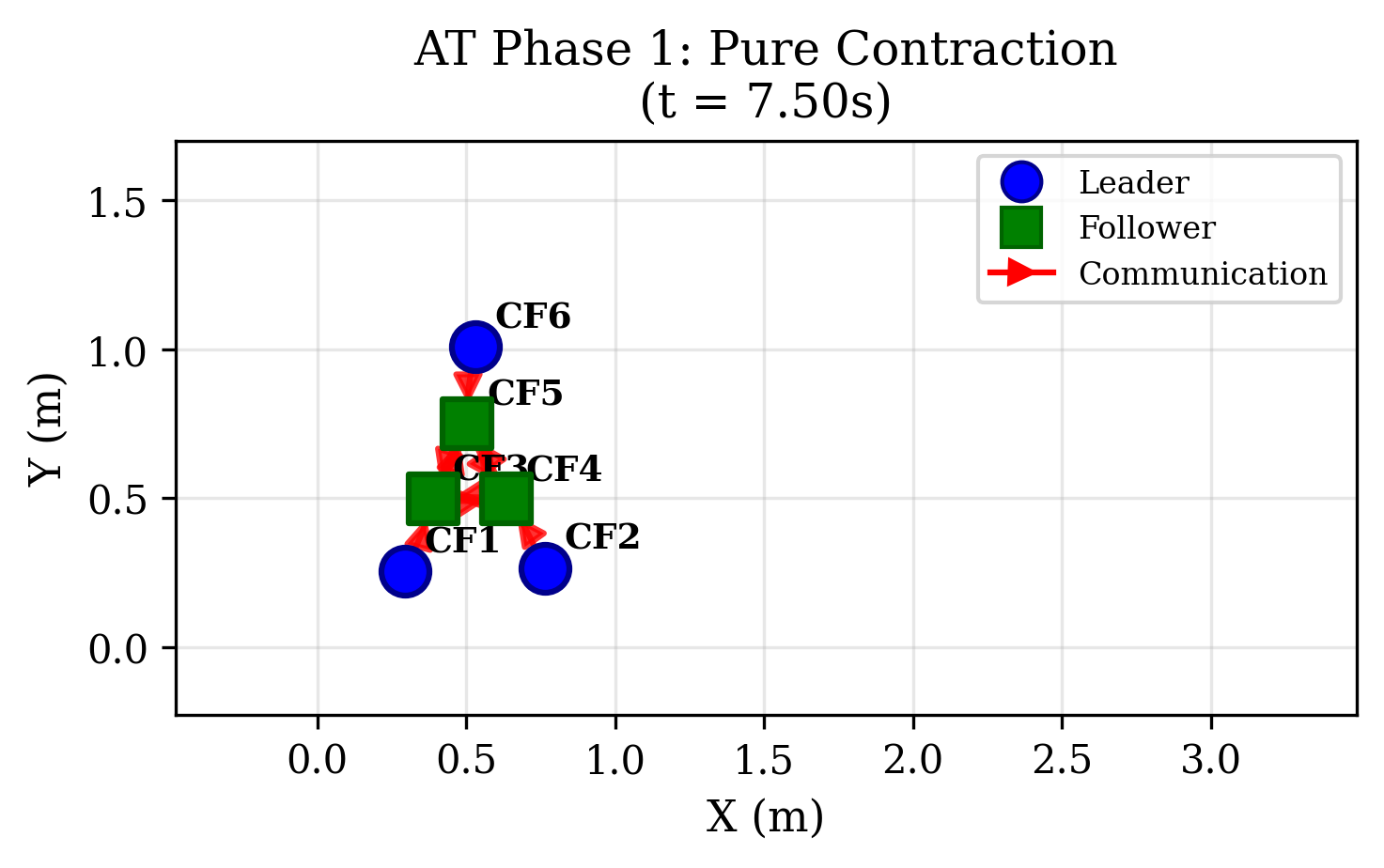
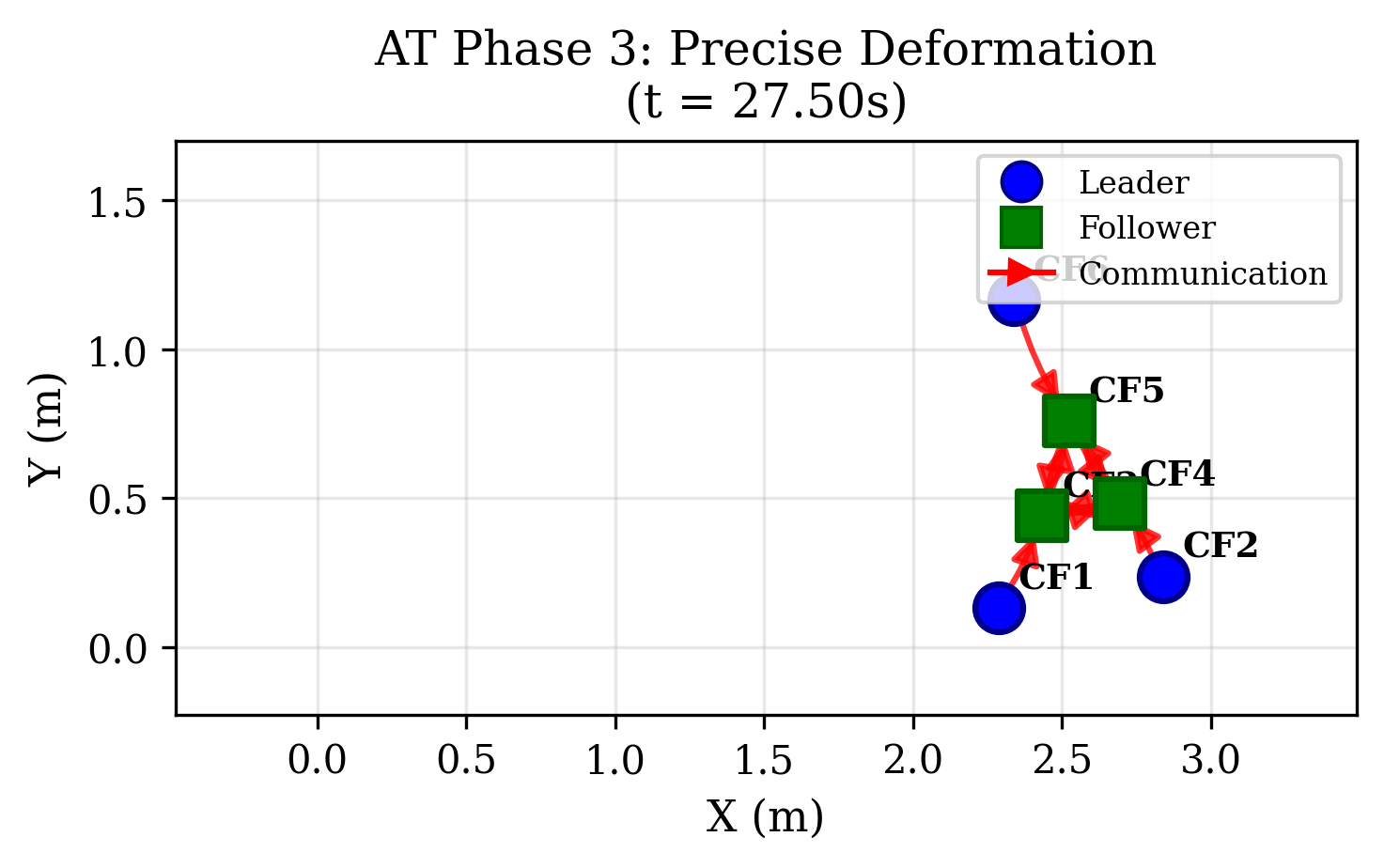
This affine transformation (AT) framework lets the entire formation contract, translate, rotate, and deform - all while maintaining collision-free guarantees through mathematical constraints on the transformation parameters.
A centralized planner must broadcast full trajectories to every agent, creating bandwidth bottlenecks and a single point of failure. The decentralized AT approach requires each follower to communicate only with its immediate neighbors - the same algorithm works whether you have 3 followers or 300.
Rather than continuously recomputing coordination parameters, each follower calculates its barycentric weights once at startup based on its initial position relative to neighbors. These weights remain fixed throughout the mission - drastically simplifying the onboard computation and eliminating a class of runtime errors.
At 27g, the Crazyflie is small enough to fly six simultaneously in a standard motion capture volume. The open-source Crazyswarm2 framework provides the ROS 2 integration needed for synchronized multi-agent control, and the 2.4 GHz Crazyradio PA handles reliable communication with all agents from a single base station.

Control architecture: leaders track reference trajectories via PD feedback, followers compute positions from neighbor states
Key features
By the numbers
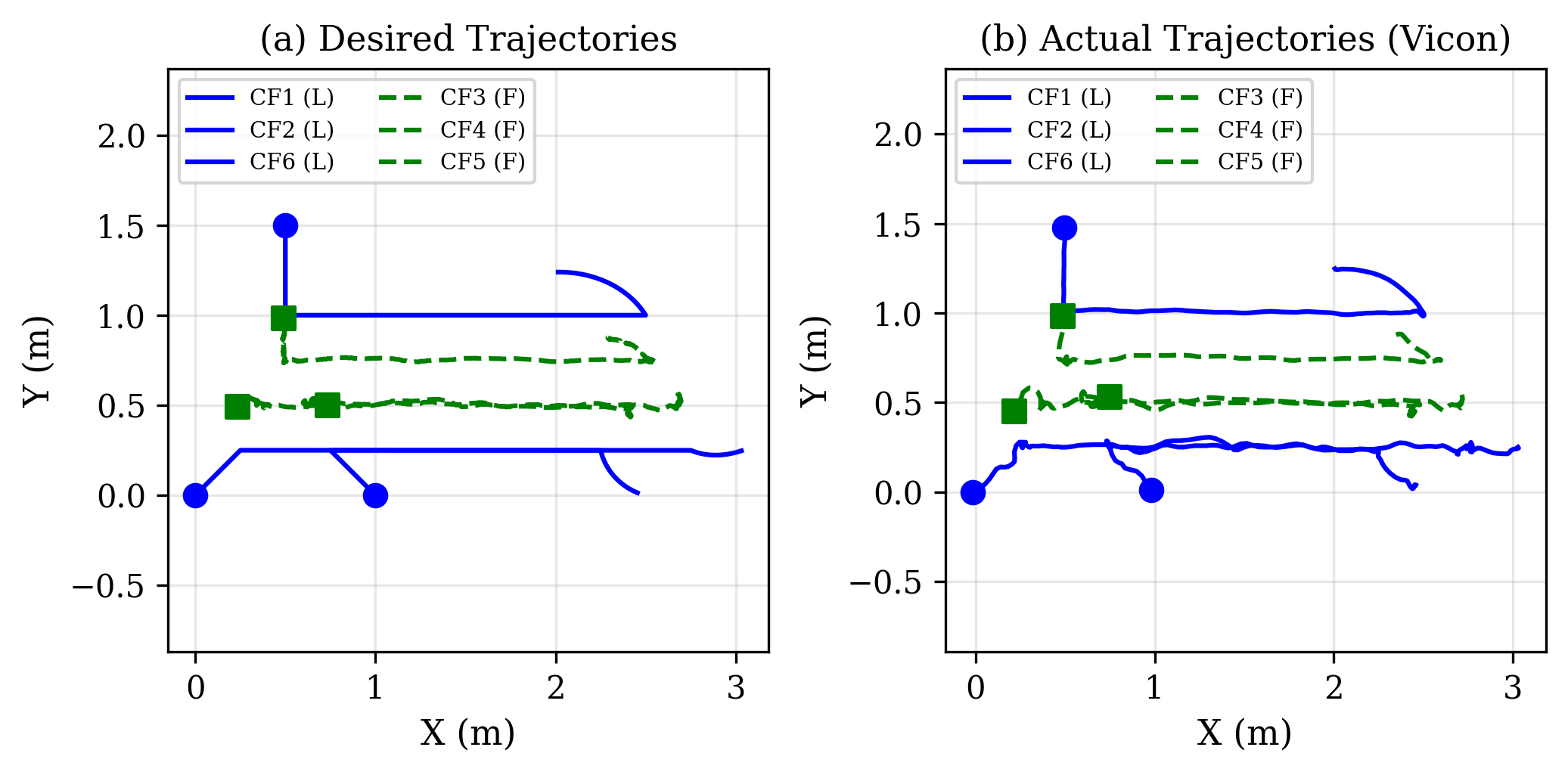
The most satisfying result wasn't the tracking accuracy - it was watching followers converge to their correct positions without ever being told where to go. They simply asked their neighbors "where are you?" and computed the answer from fixed weights. That's the power of the affine transformation framework: complex global behavior emerges from simple local rules.
The follower tracking errors (8-11cm) are roughly double the leader errors (4-9cm), which makes intuitive sense - followers accumulate uncertainty from estimating positions through neighbor communication rather than tracking a known reference. If I were to extend this work, I'd explore adaptive gains that tighten as the formation approaches steady state, and scale the experiment to larger swarms where the decentralized advantage becomes even more pronounced.